A : 分巻 B : 直巻 C : 複巻
直巻電動機には他にも興味深い特性がありますが、鉄道関連には疎いのでこれ以上の脱線はここでは避けておきます。
“ポンプ”と呼ばれる機器あるいは機能には実に様々なものが存在します。 昭和の初期まで井戸の手押しポンプが身近な存在でしたが、例えば自転車の空気入れ、航空機の油圧、人工心臓などもポンプと称するものが使われます。ヒトの心臓も、また細胞にもポンプと呼ばれる機能が存在します。半導体の製造に至っては超高真空を得るため、ポンプの概念とは懸け離れた原理の装置がポンプと呼ばれることがあります。 ここでは主に水などの液体を扱うポンプと、その動力源となるモーターの特性、さらにそのエネルギー源として太陽電池に特化したソーラーポンプについて解説します。
水などの液体を扱うポンプには、大きく分けて容積式(displacement type:ピストン式など)と加速度式(acceleration type:遠心式など)の2種類が存在します。 水などの液体に圧力を与え、ホースなどの配管に送り込んだり吸い上げる働きは全く変わりませんが、負荷(揚程・流量)に対する動力の応答は正反対の特性を示します。 簡単に表すと容積式の場合、動力の速度に比例して流量が増すのに対し、加速度式の場合は速度と揚程(圧力)が比例関係にあります。動力の力(トルク)は容積式の場合は揚程に影響しますが、加速度式は流量に関係します。
ポンプに限らず「水モノ」を扱う機器は予測困難な事態が少なく無く、あまり手を出したくないと言う方も少なからずおられますが、小学校の理科の授業で電気の性質を水に例えて説明するように、水の性質を電気に置き換えると理解しやすくなるとも言えます。
恐らくポンプと言っていちばん先に頭に浮かぶのは容積式ではないでしょうか? 理科の時間に習った“押し上げポンプ”、“吸い上げポンプ”と言ったピストン式ポンプの実験を思い出される方もいらっしゃることと思います。 容積式には他にダイヤフラム(diaphragm:隔膜)式、ギア(gear:歯車)ポンプ、プランジャ(Plunger:貫入)ポンプ、偏心(eccicentric)式、ベーン(vane)式、スクロール(scroll)式、トロコイド(trochoid)式など用途によって様々な方式があります。ヒトの心臓もまた容積式であり、人工透析などの医療用に使われるチューブ式のポンプも容積式に分類できます。 容積式に共通する特徴として、高圧力(高揚程)向け、定吐出量向け、低流量、高リップル(脈動が大きい)などの特徴があります。
ここで人工心臓について少々触れますが、当初はヒトの心臓の動きを模倣した容積式が数多く研究されていました。しかし動きが複雑な故に、小型化や信頼性などの技術的な問題が克服されず、なかなか実用化に至りませんでした。ところが加速度式(遠心式)の単純なポンプで動物実験を行ってみると、何の問題も無く心臓の替わりになることが判り、一気に実用化が進みました。“脈動の無い心臓”がはたして生体にどう影響を及ぼすのか疑問ではありますが、少なくともこれによって命を守られ社会生活を送っている人が存在することは事実です。
ポンプの働きをエネルギーとして捉えると、地下水等を貯水タンクなどの高い場所まで持ち上げる位置エネルギー、配管を通じて離れた場所に輸送したり、散水などのため水に勢いを与える運動エネルギーを動力源から水などの液体に与える働きがあると解釈できます。
位置エネルギーは“重量×高さ”でその量が求められます。
水1リットルの重さはほぼ1kg(9.8N)で、1m持ち上げると9.8J(ジュール)の位置エネルギーがポンプから与えられた計算になります。
ワットで表すと9.8W秒、約0.000027kWh。
以外と少ないと感じるかも知れませんが、例えば1時間に10立方メートルの水を10mの高さにくみ上げるポンプの仕事量は
10000(kg)×9.8×10(m)/3600(sec)≒272(Wh)
となります。
従って、このポンプは1時間に約272Wh(980MJ)の仕事をしたと言えますが、言い方を変えると272Wの出力(仕事率)で1時間働いたとも言えます。
ここでひとつ注意を要する点として、ポンプの能力を表す単位としてW(ワット)がよく用いられますが、その値がポンプの出力なのか、モーターの回転出力なのか、あるいは消費電力を表しているのかを確認しなければなりません。 ポンプに限らずエネルギーの変換や伝達には損失(変換・伝達効率)が伴います。損失はポンプの種類、負荷の状態(揚程・流量)、配管の損失抵抗など様々な要因が関係しますので、これらの特性も理解しておく必要があるでしょう。
散水等のため、水に勢いを与えるには水圧が必要です。
例えばスプリンクラーのノズルの仕様が、水圧0.5MPa、水量50L/分として水の運動エネルギーを求める場合、まず水圧を揚程に置き換えることにより、水量との積から位置エネルギーに換算すると、容易にその運動エネルギー(質量×速度の2乗/2)が推定できます。
0.5MPaは約4.9kgf/cm2の水圧に相当し、水の体積密度1g/cm3から49mの揚程に相当することが求められます。
50L/分の水量は1時間あたり3000kgの重量に相当するため、
3000(kg)×9.8×49(m)/3600(sec)≒400Wh
と、計算して1時間に約400Wh(1440MJ)の運動エネルギーが与えられ、400Wの出力(仕事率)で1時間働いたと計算できます。
実際には取水面からノズルまでの高低差(揚程)、配管の損失揚程を加算してポンプの能力を決める必要があります。
電気抵抗は電線が細く長いほど高く、電流が多いほど損失が増えることは電気の知識をお持ちの方ならご存知かと思いますが、配管の損失も同様の性質があります。 配管を流れる水などの液体は、管の内壁との速度差による抵抗を受けます。配管の抵抗は流速に比例するため、同じ流量でも断面積が小さいほど流速が高く、抵抗を受けやすくなります。 一般に配管の横引き10mあたり1mの揚程に相当する損失があるとされますが、流量に対して適切な太さの配管を用いた場合に適用されることに注意が必要です。また、ポンプの吐出口から需要口まで一定の太さの配管、継手を用いることも重要です。これは、無線などの経験がある方はご存知かと思いますが、無線機やアンテナに対してケーブルやコネクタのインピーダンスの整合が取れていないと伝送損失が生じるように、配管の口径が変わると流速の急激な変化が生じることによるエネルギーの損失が生じます。
配管の中を流れる水などの液体にはその質量と速度に応じた運動エネルギーが蓄えられています。これはコイルに流れる電流とよく似た性質があり、電圧(水圧)を与えてもすぐには電流(水流)が流れず、逆に電流(水流)を止めようとしても流れ続けようとする働きにより電圧(水圧)の急激な上昇が起こります。コイルの場合はサージ電圧、水流の場合はウォーターハンマー現象として機器や配管に損傷をもたらす要因となります。
加速度式ポンプの説明に入る前に揚程と流量に関する説明を挟みましたが、加速度式(遠心式等)のポンプの特性を理解する上で、これらの関係を理解することが重要と言えます。
恐らく業界や専門書で「加速度式」と言う名称あるいは分類は馴染みが無いものと思われます。実は容積式との特性の違いを明確にする適当な名称が無く、私(出品者:We_Love_ELT)が勝手に付けたこの場限りの名称ですので、くれぐれも「加速度式のポンプ在りますか?」などと使われないようお気を付けください。もし正式な分類名称をご存知の方がおられましたらご指摘ください。
加速度a(acceleration)は質量m(mass)のある物体に一定の力F(force)を与えることにより物体が徐々に速度を増しながら移動を始めることにより説明できます。
F = m × a
自動車のアクセルペダル(accelerator)は、速度調整よりも加速度の指示をエンジンに与える機能から命名されたものと思われます。ちなみに農耕機械等の一定速度(回転数)を維持する目的のエンジンの場合は、ペダルまたはレバーの操作量とエンジン回転数が一致するよう遠心式あるいは風圧式調速機(ガバナー)によってスロットルの開度が制御される仕組みが取られています。
かなり話が脱線しておりますが、遠心式や軸流式ポンプが水圧を得る仕組みには水などの液体の質量とその液体に速度を与える羽根車(インペラ、スクリュー等)の機械的な力が作用します。
遠心式の場合回転する羽根(インペラ:impeller)によって液体などの流体に軸の中心から半径方向に向かって遠心力(centrifugal force)が働きます。
遠心力Fcは回転数(角速度:ω)の2乗と半径rおよび質量mに比例するため、回転数が一定であればポンプが発生する圧力(水圧)は一定の値を示します。
Fc = m × ω2 × r
容積式の場合、一定の回転数により一定の流量を示す性質があり、電子回路に例えると定電流源的な特性を示すのに対し、加速度式のポンプは定電圧源的な性質があるため、負荷(揚程、配管抵抗等)による流量の変動を伴います。
また流量が増えるに従って液体などの流体が羽根車から受け取る運動量が増すため、揚程が低く流量が増すほど動力の負荷(トルク)が掛かり、逆に揚程が高く流量が少ないと負荷が減少する特性を持ちます。
このあたりでモーターについてサラッと触れておきます。 ポンプの動力として用いられるモーターは、交流モータ(誘導式:induction motor)が多く用いられます。交流モータは負荷トルクによる一定の滑りを無視して、周波数に同期した定回転運転に適した特性を持つため、例えば水道の水圧を需要量の変動に対して一定に保つには、交流モータと加速度式のポンプの組み合わせが適していると言えます。また、化学プラントのように一定の流量を保つには交流モータと容積式のポンプの組み合わせが用いられます。 また、交流モータにはDCモータのような接点(ブラシ)が不要なため、長時間稼動に対する耐久性に優れる点も、交流モータが多く採用される理由のひとつと言えます。 ただし、交流モータは定回転に適するが故、可変速運転を行うには周波数および電圧を可変するインバータを用いなければなりません。 また、ソーラーポンプのように電源が直流かつ電力が常に変動する用途には適さないことは、言うまでもありません。
ここまでの説明での加速度式(遠心式)のポンプの特徴を整理しますと、
(1). 回転数(速度)と水圧(揚程)が比例関係:高揚程(高圧力)を得るためには回転数を上げるか、またはインペラの外径を大きくする必要がある。
(2). 揚程(水圧)と流量が反比例:回転数が一定であれば、揚程が低いほど流量が増し、揚程(水圧)が高くなると流量は減少し、最大揚程(全揚程)で流量がゼロとなる。
(3). トルク(負荷)と流量が比例関係:回転数が一定であれば、揚程(水圧)が低く流量が増すほど負荷(トルク)が増し、揚程(圧力)が高く流量が少ないほど負荷(トルク)が下がる。
などの特性があります。
では、(1)の特性を使って高回転のモーターで大きなインペラを回せば揚程(水圧)はどこまでも上げられると考えられるでしょうか? 実は、加速度式の弱点はここにあります。 回転するインペラあるいはスクリューなどの羽根車は水との相対速度の2乗に比例して抵抗(損失)が増大します。さらに回転を上げようとするとインペラなどの羽根の後ろの減圧によって水などの液体は気化し、ポンプとしての能力は頭打ちになるばかりか、衝撃波によって破壊する事態となります。(キャビテーション:cavitation現象) 初期のH2ロケットの燃料ポンプの事故は、羽根の形状と強度の問題により同様な破壊が起こったことが、深海から引き上げたエンジンの残骸から解明されました。ちなみにロケットエンジンの燃料ポンプは高圧力の燃焼筒に液体燃料(液化水素/酸素)を送り込むため、燃料の一部を燃焼させながら発生した動力によってポンプを回すという手の込んだ仕組みが取られているそうです。
(2)の特徴について容積式ポンプと比較した場合、容積式は揚程(水圧)が変わっても常に一定の流量を流そうとするため、動力の最大トルクおよびポンプや配管の耐圧が許す限り揚程(水圧)を上げることが可能ですが、低い揚程でも流量は変わらないため、ポンプの能力(最大出力)の一部しか使っていない状態と言えますが、加速度式の場合は揚程が下がると流量が増すため、ポンプの能力は揚程に係わらず常に最大出力で稼動しているとも言えます。
(1)~(3)までの特徴をまとめると、加速度式ポンプは揚程が低く流量が多い用途ほど効率良く働くと言えます。 遠心式よりもさらに低揚程での流量を重視した加速度式ポンプのひとつに軸流式(axial flow type)と呼ばれる動力の軸方向に流れを作るスクリュー式のポンプもあります。その中間型として斜流式(mixed flow type)と呼ばれる遠心式と軸流式の特徴を併せ持つものも排水用のポンプなどに使われます。
加速度式ポンプの用途として注意を要する点として、地上に設置したポンプで地下水などをくみ上げる場合に、“呼び水”が必須となります。 ポンプの種類にもよりますが容積式であれば、呼び水が無くなっても空気の減圧によってある程度の吸い上げが可能ですが、加速度式の場合、減圧はほとんど期待できないばかりか、空転によってポンプを損傷する原因となります。ポンプによっては呼び水を保持する逆止弁を備えていますが、運転初期には必ず吸い上げの確認と呼び水の補充を行う必要があります。 また、吸い上げ揚程は大気圧(1013hPa)相当の揚程(約10m)以上はポンプの種類に限らず得られません。さらに水の温度に伴う蒸気圧分(20℃で23hPa、10度上昇するごとに約2倍)吸い上げ揚程が下がると共にキャビテーションも発生しやすくなります。 ただし水中ポンプのように取水面よりもポンプの位置が低くポンプ内が常に水で満たされている条件であればこの限りではありません。
ここまで加速度式(遠心式)ポンプに重点を置いて説明しましたが、加速度式は構造がシンプルな故、故障やメンテナンスの負担も少なくコスト的にも優位と言えます。 水中ポンプで概ね5m、地上用で30mまでの揚程であれば加速度式を選択した方がメリットが大きいと言えます。また加速度式の水中ポンプは地下水のくみ上げ用途であればポンプの停止とともに水抜きされるため、凍結対策も不要となります。
もし上記よりも高い揚程を必要する用途で効率やコストを考えれば容積式も選択肢に入れる必要があるでしょう。 日本とは水源事情が異なる海外には容積式(ダイヤフラム式)のポンプが多く出回っているようです。また加速度式でも多段式のインペラにより揚程と流量を確保した高価格な製品も存在します。これらはソーラーポンプに対応したDC仕様の製品も揃えられていますが、高揚程(大深度)であるが故、ケーブル損失を考慮して電圧もそれなりに高い(48V~100V超)DCモータが使われています。
ここではソーラーポンプ用途に特化して、DC(直流)モータの種類及び特性について解説いたしますが、昨今のパワーエレクトロニクスの進化に伴い、AC(交流)モータとDCモータとの境界が、モーターの動作原理自体では線引できない状態となっております。 例えば同じ形式のモーターを使った電気自動車のモーターが、一方で交流同期式電動機と呼ばれ、もう一方で直流ブラシレスモータと呼ばれたりすることもあります。 旧来の分類を基に、まずは両方の特性を明らかにした上で各種類ごとの特性を記述して参りたいと思います。
フレミングの左手の法則として良く知られる磁界B(T)を横切る長さL(m)の電線に電流I(A)が流れると、力F(N)が作用する働き(ローレンツ力)を応用し、電線をコイル状にして磁界を横切る総電流を増すと共に、回転するコイルに流れる電流の方向が磁界に対して常に同一となるような整流子(ブラシ)を介してコイルに電流を供給するようにしたのが、最も基本的な直流電動機(DCモータ)として、模型用から産業用まで広く使われています。
<ローレンツ力>
F = B × L × I
その特徴である整流子(ブラシ)を有することから、ブラシ付モータと呼ばれることもありますが、必ずしもブラシ(整流子)が有れば直流モータとは限りません。電動工具や掃除機の交流モータにもブラシが使われていることをご存知の方もおられるかと思います。
実はこれらの交流モータ(整流子モータ)は、構造的にも特性的にも直流モータと全く変わらず、同じ構造の直流モータも特に大型のモータに使われます。
ではなぜ、直流モータが交流で使えるのでしょう?
実は磁界を発生する磁石に秘密があります。 模型用などの比較的小型のモータには、フェライト磁石などの永久磁石が使われています。モータを分解して磁石を取り出した経験をお持ちの方も少なからずおられるかと思います。 しかし、電車を動かすような大型のモータは、永久磁石の持つ磁力では十分な力(トルク)が得られないばかりか、回転子(コイル)から生じる強力な逆磁界によって磁力を失う現象(減磁)が生じます。 そこで、永久磁石の代わりに電磁石を使って磁界(界磁)を発生することにより大型の直流モータが造られます。 界磁コイルの電磁石に直流電流を与えると発生する磁界は永久磁石と同じく、常に一定方向の磁界となりますが、電流の向きを入れ替えると発生する磁界の向きも反対になります。このとき、回転子のコイルに流れる電流の向きも界磁と共に反転します。もし片方だけ反転すれば回転方向も反転しますが、界磁と回転子両方が同時に反転する電流を与えると、電流の向きに係わらず回転方向は常に一方向になります。これは永久磁石を使ったモータが、電流の向きにより回転方向が切り替わることに対して、電磁石を使ったモータは常に同じ方向で回転するという性質から、交流でも回転する直流モータとして整流子モータが存在します。ちなみに誘導式の交流モータに直流を与えても回転しないばかりか、コイルを焼損する事態となりますが、交流整流子モータは直流電源でも回転します。但し界磁コイルの特性によってはやはり焼損の危険がありますので実験は自己責任でお願いします。
一般にフレミングの右手の法則は発電機を表し、左手の法則はモーターを表すと教えられるかと思います。 左右どちらがモーターだったかよく忘れて混乱することもありますが、右利きの人なら通常手回し式発電機を右手で回すかと思いますので、手動発電、自家発電等、適当に覚えておけば良いでしょう。 実はモーターの特性を説明するためには、左右両方の法則が関係します。 フレミングは親指を力の方向、人差し指を磁力線(N極→S極)、中指を電流が流れる方向として、磁界と電流および力の向きをうまく表す方法を発見したともいえます。 モーターは磁界に交差する導体に電流を流すと磁界及び電流に交差する方向に力が働くことを応用していることは最初に説明しましたが、力を与えることにより導体(回転子)が加速されることによって回転を得ます。 もし導体(回転子)が固定され全く動かない状態であれば、電流に比例して力(トルク)は増しますが、回転が停止した状態のモーター出力(角運動量:トルク×角速度)はゼロのため、左手の法則だけではモータの特性を説明しきれません。 発生した力(トルク)によって導体(回転子)に速度(回転)が与えられると、今度はフレミングの右手の法則(発電機)が関係してきます。 左右の手の親指(力)と人差し指(磁力線)を同じ方向を向くように並べてみると、中指(電流)の向きが、左右反対の向きを指していることに気付かれると思います。 これはモーターの逆起電力と呼ばれる、回転数(角速度)に比例してモーターの回転子に供給された電流とは逆方向に電流を打ち消す働きを示しています。 即ち、モーターが回転する速度に比例して電流が流れ難くなる特性、逆に表すと負荷(トルク)が掛かり回転数が下がると電流が増す特性を表します。
もし全く負荷(トルク)が無い状態であれば、回転数の上昇に伴ってある時点でコイルに流れる電流が打ち消されてゼロになるはずですが、実際には回転に伴う様々な抵抗(損失)を受けるため、それらの増大と電流の減少に伴い低下したトルクとが均衡した状態で回転数が安定します。この時点の回転数を一般に無負荷回転数、電流値を無負荷電流としています。 無負荷回転数は与える電圧に比例しますが、逆起電力の大きさに反比例します。 また、逆起電力の大きさは磁界の強さとコイルの巻き数に比例するため、磁界が強く、コイルの巻き数が多いほど、少ない回転数で電流が打ち消され、磁界が弱く、コイルの巻き数が少ないと高い回転数でバランスします。 ただし磁界が弱ほどトルクも小さくなるため、高回転向けモータは巻き数が少ない分、太い電線を使用して大電流による損失(発熱)を下げるような造りを取ります。
ここまでの説明によりDCモータの特性を整理しますと、
(1). トルクと電流が比例関係:回転子のコイルに流れる電流の値により回転トルクが決まる。同じ電流値でも巻き数を増やすか界磁の磁力を高めることによりトルクが高まる。
<DCモータのトルク特性>
T = Kt × ( I - Io )
T : トルク
Kt : トルク定数(1A当りのトルク)
I : 電流
Io : 無負荷電流
(2). 電圧と回転数が比例関係:モータの回転子に与える電圧と、回転に伴う逆起電力が均衡する速度で回転数が安定する。巻き数が多く、磁力が強いモータほど低い回転数で安定し、太い電線で巻き数を減らすほど高回転向きとなる。
<DCモータの回転特性>
N = Kv × ( V - I × R ) / Φ
N : 回転数
Kv: モータ定数(1V当りの回転数)
V : 電圧
I : 電流
R : コイル抵抗
Φ : 磁束密度
(3). 負荷トルクと回転数は反比例し、電流は負荷に比例する。負荷が掛かって回転数が低下すると電流を打ち消す逆起電力も下がり、結果として負荷電流がより多く流れる。
<DCモータの電流特性>
I = Va - Vb / R
I : 電流
Va : 電圧
Vb : 逆起電力(回転数に比例)
R : コイル抵抗
などの特性を示します。
(1)の特性を応用すると、DCモータを定電流駆動するとにより回転数に係わらず一定のトルクで回転する用途、例えば容積式のポンプ(トルクと揚程が比例)を定圧駆動するといった使い方も可能ですが、実際には起動時の静止摩擦抵抗などの影響もあり、安定した駆動を行うにはそれなりの制御が必要となるでしょう。
(2)の特性は一般にDCモータを可変速駆動する際によく用いられます。とは言っても可変電圧の電源もそれなりに高価であったり、損失(発熱)も伴いますので、単純なPWM(パルス幅変調)のスイッチング電圧を供給し、フィルタ機能はモーターのコイルが持つインダクタンス及び機械的な慣性に任せる方法が用いられます。
(3)の特性の電流に着目すると、回転数が下がろうとすると電流が増える特性をもつため、DCモータは負荷が掛かると与えられた電圧に対して回転数を維持しようとトルクを上げようとする働きがあるため、交流モータほどでは無いですが、定速運転にも適していると言えます。
ここで、これまで説明してきましたDCモータ(整流子モータ)とは正反対な特性を持つDCモータをご紹介しましょう。
加速度式ポンプの説明の中で、自動車のアクセルペダルはエンジンに加速度(トルク)の指示を与えていることに触れましたが、電車や電気自動車などモーターを動力とする乗り物の運転をする場合も、速度(回転数)を指示するよりも加速度(トルク)を指示する操作の方がスムーズな運転に適していると言えます。坂道に差し掛かってアクセルを踏み込み、速度を一定に保つ操作は、トルクを与えて重力加速度の増大を補っていることに他なりません。
ところが、これまで説明してきたDCモータの特性は、電圧に従って回転数(速度)が可変する速度指示型の特性をもつため、トルク指示を行うためには定電流制御などの複雑な制御が必要になり、特に電車のような大型モータには適さなかったようです。(現在は交流モータをインバータ制御する方式が主流のようですが)
そこで、界磁の磁力の強さが回転数とトルクに影響することを応用し、界磁の電磁石に与える電流を制御することによってもトルク指示が可能となりますが、界磁と回転子のコイルを直列に接続することにより回転速度に伴う逆起電力が界磁にも反映するようにしてやると、トルク指示に適した特性をモータ自体に持たせることが可能となります。
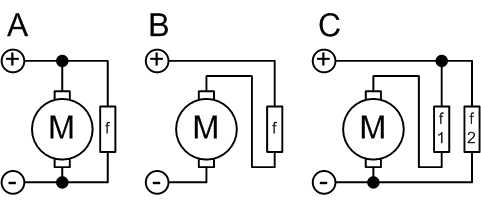
このモータは直流直巻(ちょくまき)整流子電動機として旧来の鉄道の直流電化区間で最も標準的なモータとして用いられてきました。
ちなみにこれまで説明しました界磁コイルが回転子と並列なDCモータは直流分巻(ぶんまき)整流子電動機と呼ばれ、直並列混在型として、直流複巻(ふくまき)整流子電動機なども存在します。なぜ“ちょくまき”のように重箱読みをするようになったのかは定かではありませんが、恐らく他の用語との混同を防ぐ目的があったのかも知れません。
A : 分巻 B : 直巻 C : 複巻
直巻電動機には他にも興味深い特性がありますが、鉄道関連には疎いのでこれ以上の脱線はここでは避けておきます。
学校の理科の授業で最初に習う交流モータは、恐らくDCモータの整流子を2個のスリップリングに置き換えて、回転子のコイルに交流電流を流すタイプではないかと思います。 整流子によりコイルに流す電流の方向を磁界に合わせて切り替える代わりに、直接交流電流により交互に電流の向きを入れ替えることにより交流電源の周波数に同期してコイル(回転子)が回るという最も理解しやすいモータとも言えます。 分類的には交流同期電動機と言えますが、実はこのような構造(スリップリングを介して給電)の交流モータは、まず無いと言って良いでしょう。敢えて似たような構造を持つものを挙げれば自動車のオルタネータ(交流発電機)位です。 交流モータの最大の利点は前にも少し触れましたが、接点(整流子・スリップリング・ブラシ等)を使わず、消耗部品は軸受けのベアリングのみとすることにより長時間運転に対する耐久性に優れることではないでしょうか。 ではどのようにして接点をなくすのかと言うと、先ほどのコイルと界磁を入れ替え、外側に固定されたコイルに交流電流を与え、その中に界磁に相当する磁石が回転するようにしてやれば、接点(スリップリング)を省略することが可能となります。 この考えをDCモータに応用したのがDCブラシレスモータとなりますが、この場合、整流子の代わりに磁石の向きを検出してコイルに流す電流の方向を切り替える何らかの機能が外部に必要となります。
しかし、交流モータの回転子に永久磁石を使った場合、停止状態から電源を投入した時点で、必ずしも交流電源の位相に磁石の向きが一致しているとは限りません。また、投入時点の磁石の向きによってはどちらの方向に回り出すか分からないと言う問題も生じます。 そこで、まず回転する磁石を永久磁石ではなく、電磁石にすると言う考えにより、電源投入時点に外側のコイルから生じた磁力により内側(回転子)の鉄心をその時点の極性に記憶させ、次にコイルの極性が反転すると磁気を保った回転子の鉄心が反発しながら反対方向のコイルに引き寄せられることにより回転を得ます。さらに回転方向が定まるよう位相の異なる複数のコイルを回転方向に合わせて位相順に並べることにより上記問題点が解決します。
実際には鉄心の性質上、保磁力が高いほど磁化し難い性質があるため、回転子には空芯のコイル(両端を短絡し電流が流れ続けることにより磁気を保持する)が用いられます。 このモータは外側(固定子)のコイルから回転子のコイルに誘導電流与える性質から交流誘導電動機と呼ばれ、交流モータの代表的な構造といえます。 また、位相の異なる電流は三相電源(120度位相)を用いる方式(主に三相200V用)と、単相電源からコンデンサを介して90度の進み位相を得る方式(主に単相100V用)の2種類があります。
ポンプの解説の中で配管を流れる水の性質が、コイルを流れる電流のようにエネルギーを蓄えていることに触れましたが、この性質はコイルの中を通過する磁束(磁気の量)との相互作用によってもたらされます。
コイルに電流を流そうとしても、より多くの磁束が生じるほど発生した磁束によって電流を打ち消す方向に起電力が生じます。またコイルの中を通過する磁束の量を増やそうとしても、コイルは磁束の変化を打ち消す方向に電流を流そうとします。逆にコイルに流れている電流を止めようとするか、または磁束の量を減らそうとしても、磁束の量を維持しようとコイルに電流を流し続ける方向に起電力が働きます。
<レンツの法則>
E = - dΦ / dt
E:起電力(電流を流そうと発生する電圧)
dΦ:磁束の変化(マイナスは磁束の変化を打ち消すことを表します)
dt: 時間の変化(dΦ/dtは時間あたりの磁束の変化率)
ちょうどポンプと配管を流れる水との関係が、コイルとその中を通過する磁束との間にも存在すると考えて良いでしょう。磁束にとって配管に相当するのは、空間あるいは鉄心などの磁束の通路と考えて下さい。
前置きが長くなりましたが、誘導モータの特性を理解するためにはこれらの性質を知っておく必要があるでしょう。
固定子のコイルに交流電流を流し、発生した磁束が回転子のコイルを通過しようとすると、両端が短絡された回転子のコイルには電流が生じ、磁束を打ち消そうとします。 固定子からしてみれば、回転子が磁束の増加を妨げるため、電流は逆に流れやすくなっています。これは誘導モータの起動時における突入電流として現れますが、磁束が打ち消されているため回転力(トルク)は生じず、モータに与えられた電気エネルギーは回転子のコイルに電流として蓄えられます。 短絡状態で電流が生じた固定子のコイルは、コイルの僅かな抵抗により熱としてエネルギーを放出し、電流は少しずつ減衰しますが、コイルは電流を流し続けることにより磁力を保持します。
ここで固定子の電流の向きが入れ替わると逆向きの磁界が生じますが、回転子は前に記憶された磁気を保持しているため、今度は磁束を増大する方向に磁力が働き、固定子の電流は流れ難くなります。また、固定子と回転子の間には磁力によって引き付け合う力が生じます。
次に固定子の電流の向きが入れ替わったところで、今度は反発する力が生じるため、位相の遅れた電流が流れている隣の固定子の方向へ引き寄せられ回転力が発生します。 電流投入時からの電流と磁束の関係を順を追って説明しましたが、実際にはこれらの現象が過渡的に進行しながらモーターが回転を始めます。
回転子が記憶した磁界は、位相順に並んだ固定子の磁界を追いかけるように回転します。 もし負荷(トルク)が全く無ければ、交流の周波数に同期してモータは回転しますが、ひとつ気になるのは回転子の磁力が電流とともに徐々に減衰して磁力が無くなってしまうのでは無いかと思われるかも知れません。 実は、ここで再びフレミングの法則が関わってきます。位相順に並んだ固定子から生じる回転磁界は、同期して回転する回転子から見ると相対的に停止した磁界が横切っているように見えますが、もし回転子の磁力が弱まるか、または負荷によって回転が下がると、固定子の回転磁界に、回転子のコイルが追いつかず、相対的な速度差“滑り”が生じます。この速度差によって回転子のコイルに電流が流れることによって回転子に再び磁力が与えられます。 また、固定子のコイルから見ると回転子のコイルが同期して回転している状態は、交流電流の位相と磁束の変化が同期しているため、固定子のコイルに流れる電流が打ち消され、電流は流れ難い状態ですが、回転子のコイルに遅れが生じると、電流の位相に磁束の変化が追いつかず電流が流れやすくなる状態、言い換えると電源の負荷が増える状態となります。
誘導モータは、負荷(トルク)に伴う一定の滑りが生じることによって、交流周波数の同期回転数よりも低い回転数で回ります。 ちなみに誘導モータの回転方向にトルクを与えると負の滑りが起こって同期速度より高い回転数で回りますが、同期周波数に引き込む力によって自動車のエンジンブレーキのような制動が掛かります。この状態はもはやモーターではなく交流発電機として電力会社に売電している状態とも言えます。
滑りに伴うトルクのピークは10%~30%程度の滑り(0.7~0.9)の範囲にあるため、滑りの大きい領域で動作させた場合、トルクの低下と共に効率も下がる(損失による発熱を伴う)結果となるため、電圧を可変しただけでは十分な回転速度制御が行えないため、誘導モータを可変速運転する場合、可変電圧可変周波数電源(VVVF:Variable Voltage Variable Frequency)が必要となります。 近年のパワーエレクトロニクス(主に電力向け半導体素子)の進歩に伴い交流電源を一旦直流に整流した後、スイッチング(PWM)制御によって電圧及び周波数を自由に制御することが可能となり、直交逆変換機能からインバータ(inverter)制御と一般に呼ばれる方式が、産業用から家電製品まで広く用いられるようになりました。回転速度に合わせて滑りの量を最適な状態に維持することにより高効率な可変速運転を実現したと言えます。 ここで、同期周波数が可変できるのなら、同期モータの可変速運転も可能と考え、誘導モータの滑りによる損失も無くすことにより更なる高効率なモータが実現可能となります。これが永久磁石同期電動機として、ハイブリッド自動車の燃費性能や電気自動車の航続距離を伸ばす技術のひとつの役割を担っています。
冒頭にも触れましたが、永久磁石同期電動機とDCブラシレスモータは名称こそ異なるものの、全く同じ構造を持つ電動機です。 なぜこのような分類がされているのか敢えて理由を挙げるとすれば、それぞれ異なる用途、分野から発展してたどり着いた先がたまたま同じ構造のモータになったとしか説明のしようがありません。 DCモータの固定子と回転子を入れ替えて整流子の代わりに磁極の方向に合わせて電流の向きを切り替えることによって整流子(ブラシ)を無くしたのがDCブラシレスモータであることは前にも触れましたが、比較的小型のDCモータ(パソコンのディスクドライブ、ファンモータ等)に多く使われ、直流を電源として、従来のDCモータ(ブラシ付)に置き換わる用途として早くから発展してきました。 ここでもパワーエレクトロニクスの進歩と永久磁石の素材革命により従来不向きとされた比較的高出力の用途にもブラシレスモータの耐久性と、低損失、高制御性によって徐々に交流モータの領域に用途が拡大して行きました。 一方、交流モータが得意とする動力用途においては、省エネ性能が社会的、商業的に重要な要素となったことが、誘導モータのインバータ制御から発展して永久磁石同期電動機を生んだ背景とも言えます。
直流ブラシレスモータの特性をモーター単体で見ると交流同期電動機と同一と言えますが、外部の制御回路まで含めると従来のDCモータと同一と考えて良いでしょう。 ただし、外部制御回路には最低動作電圧と最大定格電圧が規定されています。この範囲内であれば電圧と回転数が比例し、トルクと電流が比例するDCモータの特性を示しますが、最低動作電圧以下では動作しないばかりか、定格を超える電圧を与えた瞬間に制御回路は回復不能な故障を起こします。これでは回転範囲が狭くなるように思われるかもしれませんが、ブラシレスモータは必ず回転子の磁極を検出する機能を備える必要があることを逆に応用して、磁極の変化から回転数を検出することによって低速から高速まで広い範囲で速度制御を行なう用途に適しています。 この場合、電源電圧は最高回転数、最大トルクのみに影響しますが最低回転数は磁極の検出方法によっては、回転が不安定になることもあります。
このあたりでまずは太陽電池についておさらいしておきましょう。 太陽電池は太陽の光から直流の電気を作るパネル状の器具であることは、当オークションをご覧になられている方ならご存知のことと思います。 太陽電池を使った実験をしていると、通り掛かりの人から「これはどのくらいのお湯が沸かせるんだい?」と聞かれ、説明に困り果てることもしばしばです。
太陽の光は可視光を含む電磁波の一種であることは物理の授業等で学んだことと思います。また電磁波は電界と磁界の波であると同時に光子と呼ばれる粒子としての性質も兼ね備え、その波長(振動数)に応じたエネルギーを蓄えているとされています。 モーターの解説の中でもコイルが蓄えるエネルギーは電流と磁束との相互作用であり、ポンプと水流との関係に類似すると説明しましたが、電磁波である光子にも同様な性質があると考えて良いでしょう。 光(光子)の持つエネルギーが物質と相互作用することにより、それが熱となってお湯を沸かしたり、電子をはじき出すことによって電気を作る作用がおこりますが、これには光の波長と深い関係があります。水の分子(H2O)は酸素(O)の原子に2個の水素(H)の原子が所定の角度で結びついていることにより電気的な片寄りを持っています。このことが特定な波長(振動数)に対して共振をおこし、振動は熱エネルギーとなります。実際は大気中の水蒸気(気体状の水分子)によっても吸収されるため、それ以外の波長のエネルギーが主に利用されます。
太陽電池の場合はシリコン(珪素)などの原子や色素などの分子との相互作用によって電子をはじき出しますが、これを電流として取り出すためには電位差(電界)が必要です。シリコンの場合は結晶の中に2つの異なる不純物を加えることによって、色素の場合は化学反応によるイオンによって電位差をつくり、はじき出された電子を電極に集めることにより電流の流れを作り出します。 ここで気づいて頂きたいのは、太陽電池は光(光子)の量に応じて、電流の流れを生む性質があると言うことです。通常の電池は一定の電圧を発生して負荷に応じた電流が流れるのに対し、太陽電池は光の量に応じた一定の電流を生む電流源的な電池であると言うことです。 太陽電池により直流モーターを定電流駆動しようとすると、モーターの解説でも触れたようにトルク指示的な駆動になることに注意が必要です。
太陽電池に何も負荷をつながない状態で電極(端子)間に現れる電圧のことを開放電圧と言います。これは光子との相互作用によってはじき出された電子を集めるため、シリコン結晶系の場合、薄く切り出したシリコン結晶の片方の面にホウ素・インジウムなど3価の元素を加えて電子が不足したプラスの電位(P型)、反対の面に燐・砒素などの5価の元素を加えて電子が余るマイナスの電位(N型)を生じさせることにより、太陽電池のセル1枚あたり約0.6Vの電位差が作られます。 通常12Vのバッテリーを充電する場合の開放電圧は20V程度必要とされ、36枚のセルを直列につないで1枚のパネルにします。 P型とN型のシリコン接合の電位差(順方向電圧)は温度センサーとしても使われるほど非常に温度の影響を受けやすく、温度が高いほど開放電圧が下がる特性を持っています。 通常25℃の温度での値を開放電圧として規定していますが、実際は太陽の光によってもパネルの温度が上昇するため、この値より低い値を示す場合がほとんどです。また逆に気温が極端に低い場合は開放電圧が高くなるため、使用する機器の最大定格を越えないか注意する必要もあります。
普通に考えると電池を短絡(ショート)することは非常に危険なことで、加熱や発火、さらには爆発の危険を伴います。 ところが太陽電池に限っては、ショートさせても短絡電流以上の電流は流れないばかりか、太陽電池そのものに何のストレスも掛かりません。(但し配線や接続している機器によってはこの限りではありませんので、むやみに短絡することは避けなければなりません。) これは、太陽電池が電流源的な電池である理由に他なりません。 逆に捉えると短絡電流以上の電流は太陽電池から取り出すことができないことを意味します。しかも太陽の光の量(強さと捉えても良いでしょう)に比例した電流しか取り出せず、電流を多く流すほど開放電圧は下がります。
開放電圧が0Vになるまで電流を取り出した状態がすなわち短絡電流ですが、太陽の光の量を決めて置かないとその値も決めることができません。 そこで一般に地上には1m2あたり1kWの太陽光のエネルギーが降り注いでいるとされるため、この値を基準に短絡電流が規定されています。 また太陽電池に限らず光との相互作用には光の波長が深く関わるため、大気を通過する間に失われる波長の成分を考慮して、エアマス(AM:Air Mass)と呼ばれる値が規定されています。
AM0は大気が全く無い真空状態の宇宙空間における太陽の光の波長分布を表し、AM1は地球上の標高0mの地点において真上(天頂)から太陽の光を受けた状態、すなわち地球の大気を垂直に通過した太陽光の波長分布を表します。
通常、太陽が真上に来るのは赤道地帯に限られ、特定な季節の正午にしか有り得ないため、暫定的にAM1.5(凡そ45度の高さの太陽光が通過する大気の厚さに相当)の波長分布が用いられます。つまり季節や時刻、標高や緯度、さらに天候(大気中の水蒸気や塵の量)によって太陽電池の短絡電流の値は光の波長成分による感度の違いが生じます。

短絡電流まで電流と取り出した状態が、最も電流が取り出せることから、この状態が太陽電池の最大出力と考えてしまいがちですが、このときの電圧は0Vということに注意してください。 出力は電力値で表わされますが、電力P(W)は電圧E(V)と電流I(A)の積によって求められます。
P = E × I
電流が最大値であっても電圧が0Vならば電力も0Wであり、何も仕事をしていない状態となってしまいます。 電流は流れているのに、なんだか納得できないと思われるかも知れませんが、水に例えると水位の差(電位差)あるいは水圧(電圧)の無い水の流(電流)れと捉えると、何となく理解できるのではないでしょうか?
水の流れの中に水車などによって動力を取り出そうとすると、はじめて水圧または水位の差が生じます。太陽電池も同様に電流の流れに負荷となる抵抗が加わると電位差が生じ、初めて電力が取り出せます。 では、抵抗が大きいほど取り出せる電力も大きくなるのでしょうか? 水の例で例えると水車に重い負荷を掛けた状態と言えますが、もし水位差または水圧が際限無く上昇するならば取り出す動力も上昇します。 しかし実際は水路の水があふれたり、送水管が破裂したりして取り出せる動力には限界があります。太陽電池も同様に開放電圧以上の電圧には上昇しないため、取り出せる電力に限界があります。また開放電圧まで上昇した状態は、電流の値が0[A]の状態ですので、やはり電力は0[W]になってしまします。
ではどこに最大出力があるのかと言うと、開放電圧に近い、電流が下がりかけたあたりに電流と電圧の積が最大を示す“最大電力点”(Maximum Power Point)と呼ばれる箇所があります。開放電圧が約20Vの12V充電用のパネルであれば、15V~17V付近と見て良いでしょう。実際は日射量や温度によってこの値は常に変動しているため、系統連係用のインバータ(パワーコンディショナ)や、高効率の充電コントローラには負荷点(取り出す電流と電圧の比)を移動させながら最大電力点を追尾する“最大電力点追尾機能”(MPPT:Maximum Power Point Tracker)が備えられています。
最大電力点はまた、太陽電池の性能(変換効率)によっても異なる値を示します。
【参考グラフ】
I-V特性カーブ

・横軸は電圧、縦軸は電流を表わします。
・各曲線は日射量に応じたI-V特性カーブです。
・その時の最大電力点が右上がりの折れ線で示されています。
太陽電池の性能(変換効率)を左右する最も重要な要素は、将来画期的な方式が現れたとしても最後には損失を如何に少なくするかに関わってきます。 太陽光のエネルギーのうち現在一般に普及している太陽電池(多結晶シリコン型)で15%程度、研究レベルの試作品(HIT型)でも23%程度しか使うことができませんが、このレベルに到達するまで数十年の歳月と地道な改良によって年に1%にも満たない効率の改良が行われてきました。
太陽光から電力を得る過程においては様々な損失が生じます。 まず最初に生じるのは保護ガラスによる反射と吸収、さらにセル自体が感度を持たない波長の光も反射したり、通過してしまったりします。また一部の波長の光は熱としてセルに吸収されます。 セルのシリコンなどの原子によって光子の持つエネルギーが吸収(相互作用による自由電子の放出)された後も、電極に自由電子などの電荷が集まるまでに再結合してしまったりセル内部のリーク電流として消費されます。また電極の接合抵抗成分、配線抵抗なども主な損失の要因となりす。 ちなみにHIT型の太陽電池は結晶シリコンをアモルファス(非晶質)シリコン層で挟み、アモルファス層の作る電場により電子などの電荷が再結合する前に速やかに電極へ集める作用があると言われています。
電流特性(I-V)カーブの水平部分が右下がりになるのは主に再結合による損失が関係し、肩の部分から開放電圧までなだらかに下がるのは抵抗成分による損失が関係します。 最大電力点はI-Vカーブの肩の辺りにあり、“最大出力動作電流”(Imp)と“最大出力動作電圧”(Vmp)の積はこの点を右上の頂点とした長方形の面積に相当します。 もし太陽電池が理想的な電流源であれば、電流電圧特性曲線(I-Vカーブ)は0Vから開放電圧手前まで短絡電流に相当する水平な直線となって、開放電圧で垂直に下がる矩形状のグラフになります。 この場合、最大電力を表わす長方形の面積は短絡電流と開放電圧の積に等しく損失が最も少ない状態とも言えます。
この最大面積(開放電圧×短絡電流)と実際のI-Vカーブが作る長方形の面積(最大電力)との比を矩形率あるいは曲線因子(FF:fill factor)と呼び、太陽電池の性能を評価する指標のひとつとなります。
FF = ( Vmp × Imp ) / ( Voc × Isc )
まずは、電流ブースタを使わず太陽電池から直接ポンプを駆動した場合、どのような問題があるのでしょうか?
太陽電池が日射量に応じた電流源的な電源であることは、DCモータがトルク指示的な駆動になるため、容積式のポンプは揚程が日射量により変動し、加速度式は流量が変動すると言う、本来の特性とは逆の使い方となってしまいます。 また、DCモータは回転数に比例した逆起電力(電圧)を生じる特性を持つため、起動時には太陽電池の短絡電流付近の低い電圧で動作している状態から、回転が上昇するにつれ開放電圧付近の少ない電流で動作するようになります。 このため起動時には最大電力点から大きく離れた状態からなかなか起動せず、起動後も日射量の変動とともに最大電力点から外れた領域を行き来し、日射量が下がり出すと一気に回転数が下がる失速状態を起こしやすくなります。
十分な稼動を確保すためにはポンプの出力を太陽電池の容量よりもかなり小さめのものを選定するか、太陽電池の出力をポンプの能力より十分高くする必要があります。 このことは逆に日射量が十分にある条件ではポンプに対して過剰な電流が供給され、太陽電池の開放電圧に近い状態でモータに負担を掛ける結果にもつながります。特にブラシレスモータのような制御回路を持ったモータは、過電圧あるいは過負荷による故障の原因ともなります。
そこで、電流ブースタの働きとして何が求められるかが決まります。
(1). 太陽電池の負荷点をモーターの回転数や負荷電流に係わらず、最大電力点に合わせる。
太陽電池の発電電力を最大限引き出すことにより、少ない日射量でもより早くポンプを起動すると共に日射量の低下に伴う失速を抑制し、稼動効率を高める働きをします。MPPTと考え方が似ていますが、モータの逆起電力の変動はバッテリーや商用電源の変動と比較にならないほど大きいこともあり、最大電力点を固定値としても十分なだけの効率の改善効果があるため、あえてコストの掛かる追従方式はとらない場合が多いようです。
もちろん追従方式を使えば、太陽電池の最大電力点の違いや変動まで考慮した改善効果は期待できます。
(2). モータの逆起電力と太陽電池の出力電圧との電圧差分を降圧コンバータにより電流増幅する。
少々分かりづらい表現ですが、太陽電池の発電電力(=電圧×電流)の電圧を下げることにより同じ電力のまま電流をより多く取り出す働きと理解してください。
モーターにより多くの電流を与えることは、トルクを増大させやはり起動を早めたり、稼動効率を高める働きがあります。
ただしモータが停止状態の逆起電力はゼロであることに注意が必要です。単純に計算すると電力が供給された状態で、電圧がゼロならば電流は無限大になってしまいますが、降圧コンバータの最大能力を超える電流は流れません。しかしモータの最大定格を越える電流を長時間与えるとモーターの焼損の原因ともなりますので、通常行うのと同様なモーターの定格に見合った電流ヒューズあるいはサーマルスイッチ等による過熱防止対策が必要と言えます。
(3). 出力電圧を制限し、モーターの過電圧や過回転を防止する。
これは日射量が十分にある状態でモーターの負荷が軽くなった場合など、太陽電池の開放電圧が直接モータに掛かったり、定格を上回る電力でモータが過熱したり、過回転により寿命が早まることを防止します。
従って制限電圧がモーターの定格に適合しているかの確認が必要と言えます。
解説は以上ですが、ご不明な点や分かりづらい表現などご指摘いただければ追加・変更して参りたいと思います。